
Понятие о системах управления электроприводов
В теории автоматического управления (ТАУ) используется термин «система автоматического управления» (САУ), который объединяет две составные части системы: «управляющее устройство» и «объект управления».
Данное понятие абстрагируется от физической природы САУ и представляет собой математическое описание — математическую модель некоторой подразумеваемой физической системы.
В прикладных работах по автоматическому управлению вместо термина САУ используется понятие
«Динамическая система» ‑ физическая система, объединяющая две части:
- систему управления — совокупность различных технических средств управления;
- объект управления — некоторую техническую систему (рис. 1).
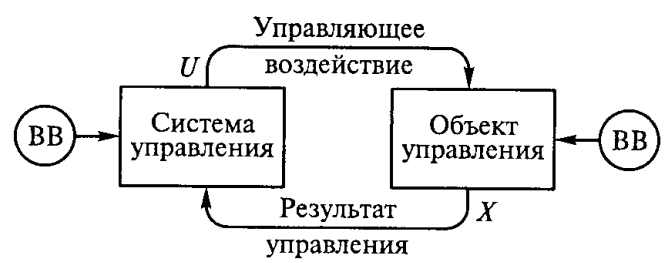
Рисунок 1. Общий вид контура управления
Обе части динамической системы могут иметь внешние воздействия (ВВ) — входные задающие и возмущающие воздействия.
Под термином «система управления электропривода» подразумевается комплекс технических средств, формирующих и осуществляющих воздействия на двигатель с целью управления движением рабочего органа (РО) производственной установки в соответствии с технологическими требованиями.
В понятии СУЭП конкретизируется объект управления, которым является двигатель (Д) совместно с механической передачей (МП) и рабочим органом.
В составе СУЭП выделяется:
- слаботочная часть, формирующая алгоритм управления, и
- силовую часть, осуществляющую силовое управляющее воздействие на двигатель.
По функциональному назначению управление в электроприводах разделяется на два уровня:
- верхний — технологический, внешний уровень, и
- нижний — внутренний.
На верхнем уровне СУЭП1 вырабатывает технологическое задание отдельной технической установки (например, станка, крана, лифта) или целой технологической системы (например, системы водоснабжения, теплоснабжения, электроснабжения).
На систему управления нижнего уровня (СУЭП2) возлагается задача формирование свойств собственно электропривода, его статических, динамических, точностных характеристик (рис. 2).
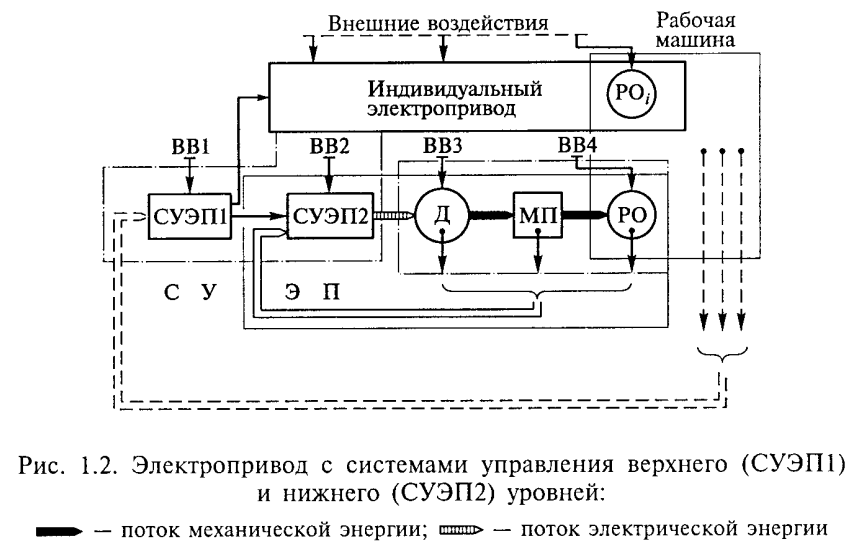
Помимо СУЭП2, это понятие включает в себя двигатель (Д), механическую передачу (МП) и рабочий орган (РО).
СУЭП2, Д, МП, РО, имеющие друг с другом внешние и внутренние обратные связи, образуют совместно единую динамическую электромеханическую систему. Вход ‑ задающий сигнал на СУЭП2, выход — движение РО.
Если двигатель приводит в движение только один РО, то электропривод называют индивидуальным электроприводом. Объектом управления для СУЭП1 может быть как один электропривод, так и совокупность всех индивидуальных электроприводов производственной установки.
Задачи, возлагаемые на СУЭП1 и СУЭП2
на примере электропривода лифта.
СУЭП1 вырабатывает команды автоматического выбора направления движения кабины, начала движения, торможения и остановки, определения этажей для остановок.
СУЭП2 формирует плавные динамические процессы разгона и торможения двигателя, обеспечивает необходимые для точной остановки диапазон регулирования скорости и жесткость механических характеристик двигателя.
СУЭП1 и СУЭП2 конструктивно могут быть выполнены из разных блоков, но могут и объединяться в общей панели управления или в программируемом контроллере.
Классификация систем управления электроприводов
Автоматизированные системы подразделяются на два типа:
- незамкнутые — без учета результата управляющего воздействия на объект управления;
- замкнутые — с учетом через обратные связи результата воздействия на объект управления.
В основе замкнутых систем лежит принцип обратной связи, управление по отклонению.
Дополнением является комбинированное управление, когда, кроме отклонения от задания, вводится в управление возмущающее воздействие.
Задачи СУЭП:
- стабилизация координаты объекта управления;
- программное управление по заранее известному закону;
- слежение за измеряемой величиной, закон изменения которой заранее неизвестен;
- самонастройка (адаптация).
Дополнительные признаки классификации СУЭП:
- уровень управления:
- верхний (технологический);
- нижний (свойства электропривода);
- тип алгоритма управления:
- линейный; нелинейный;
- аналитический;
- логический на основе жесткой (классической) логики;
- логический на основе нежесткой фаззи-логики;
- способы управления:
o модальное управление;
o каскадное (подчиненное);
o частотное скалярное управление;
o частотное векторное управление;
- технологическая координата электропривода:
- скорость рабочего органа;
- положение рабочего органа;
- тип двигателя:
- двигатель постоянного тока;
- вентильный;
- индукторный;
- вентильно-индукторный;
- асинхронный;
- синхронный;
- элементная база СУЭП:
- аналоговая;
- цифровая;
- релейно-контакторная;
- логическая бесконтактная (логические элементы, контроллеры).

Поделиться с друзьями: