
Релейно-контакторні системи керування
Під терміном РКСУ(Релейно-контакторні системи управління) розуміють логічні системи управління, побудовані на релейно-контакторної елементної бази та здійснюють автоматизацію роботи приводу.
У завдання РКСУ входить автоматизація наступних процесів: увімкнення та відключення двигунів, вибір напрямку та швидкості обертання, пуск та гальмування двигуна, створення тимчасових пауз у русі, захисне відключення двигуна та зупинення механізму. Безпосереднім об'єктом управління для РКСУ є двигун, що живиться від мережі.
До переваг РКСУ відноситься:
- наявність гальванічної розв'язки ланцюгів,
- значна комутаційна потужність,
- висока стійкість до перешкод.
Недоліки РКСУ є:
- контактна комутація, яка потребує відповідного обслуговування та обмежує термін її служби;
- обмежена швидкодія;
- підвищені масогабаритні показники та енергоспоживання.
Електричні схеми та способи аналізу РКСУ
Послідовність роботи вузлів у складі РКСУ залежить від їх електричних з'єднань. Електрична схема РКСУ є графічною формою зображення РКСУ.
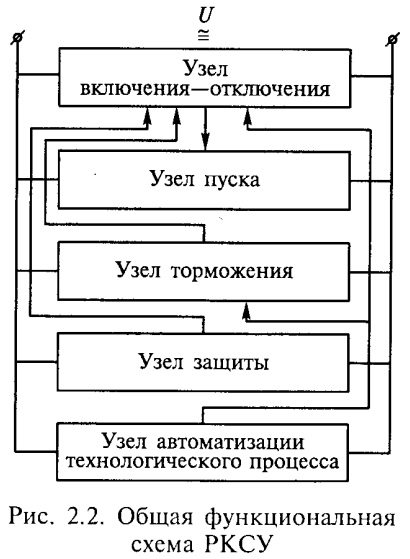
На рис.2.2 приведена общая функциональная схема РКСУ в виде узлов.
В принципиальной схеме приводятся все элементы системы управления, электрические соединения элементов. Допускается изображение какого-либо узла без раскрытия его внутреннего содержания. Если узел не стандартный, то его схема должна быть дополнительно приведена как приложение. Схема не дает пространственного расположения аппаратуры, поэтому дополнительно дается монтажная схема.
Оценить работоспособность и качество разработанной РКСУ можно на основе ее анализа.
В общем анализе дается характеристика РКСУ в целом указываются назначение системы, тип элементной базы, выделяются основные узлы и отмечаются принципы, на которых они построены. Способ описания — словесный.
В детальном анализе дается подробное описание функционирования всей РКСУ или ее отдельных узлов, описывается алгоритм логической системы управления.
Алгоритм может быть представлен как словесно, так и формализованно ‑ символическим, аналитическим и графическим способами.
Наиболее строгой и компактной формализацией описания РКСУ является аналитический способ, выраженный в структурных формулах булевой алгебры логики. Обозначив логические входные независимые переменные через , внутренние зависимые переменные через , а выходные переменные (функции) через , получим структурные формулы подобного типа:
Такая запись не отражает временной последовательности работы данного узла. Этот способ используется главным образом при синтезе РКСУ, при формировании аналитического алгоритма управления.
Для детального анализа РКСУ применяется графический способ описания в форме графа или циклограммы.
Циклограмма состоит из следующих элементов:
-
такт — интервал времени, на котором в состоянии системы не происходит изменений;
-
период включения ‑ интервал времени включенного состояния аппарата (изображается горизонтальной прямой в строке);
-
период отключения ‑ интервал времени отключенного состояния аппарата (изображается отсутствием горизонтальной прямой);
-
воздействие одного аппарата на другой изображается тонкой вертикальной прямой.

Поделиться с друзьями: